หลักการทำงานของโพรบ Positector UTG M และ UTG C
หลักการทำงานของโพรบ Positector UTG M และ UTG C
PosiTector UTG C probes มีตัวแปลงสัญญาณแบบ dual element พร้อมด้วยค่าชดเชย V-Path โดยอัตโนมัติ ความหนาจะถูกกำหนดโดยการวัด t1 (ไม่เคลือบผิว) หรือ t2 (เคลือบ) หารด้วยสองส่วนแล้วคูณด้วยความเร็วของเสียงสำหรับวัสดุนั้น (เหล็ก)
ดูรูปที่ 1
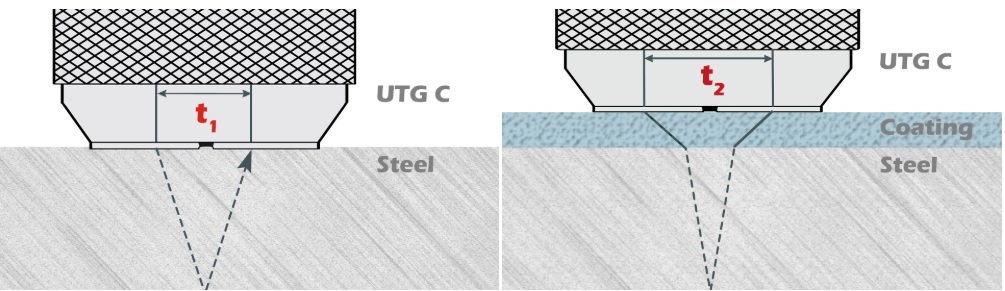
สำหรับวัสดุที่ไม่เคลือบผิว t1 เกี่ยวข้องโดยตรงกับความหนาของวัสดุ เมื่อวัสดุเคลือบเวลาการขยายตัวจะเพิ่มขึ้นและแสดงไว้ด้านบนเป็น t2
การเคลือบผิวเช่นสีจะมีความเร็วของเสียงน้อยกว่าของโลหะ ดังนั้นเทคนิคการสะท้อนเดี่ยวจะทำให้ได้ผลที่มีความหนามากกว่าการเคลือบผิวรวมจริง + ความหนาของโลหะ ผลที่ได้จะมีค่าความหนาสีสูงขึ้นอย่างเห็นได้ชัด ดังนั้นจึงไม่ใช่เรื่องง่ายในการวัดความหนาของสีและลบออกจากผลการวัด
PosiTector UTG M probe กำหนดความหนาโดยการวัดเวลาระหว่างสะท้อนผนังด้านหลังอย่างน้อย 3 การสะท้อน
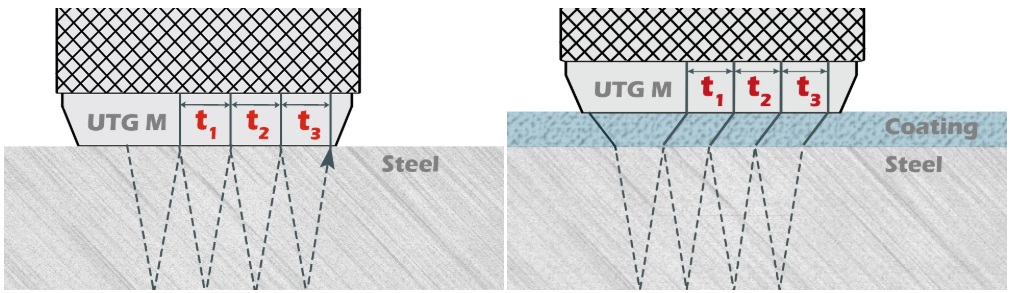
ในรูปที่ 2 ข้างต้นโหมด echo หลาย ๆ วัดเฉพาะเวลาระหว่าง echoes ไม่ว่าเหล็กจะเคลือบหรือไม่ทุกครั้งระหว่างเสียงก้องจะเหมือนกัน ในโหมดหลาย echo ตัววัดกำหนดความหนาโดยการวัด t1 + t2 + t3 หารด้วยหกและคูณด้วยความเร็วของเสียงสำหรับวัสดุนั้น การคำนวณความหนาที่เกิดขึ้นจากเครื่องมือนี้จึงเป็นการวัดความหนาของเหล็กอย่างถูกต้องโดยไม่คำนึงถึงความหนาของผิว
ความเร็วของเสียงจะแสดงเป็นหน่วยนิ้วต่อไมโครวินาทีหรือเมตรต่อวินาที มันแตกต่างกันสำหรับวัสดุทั้งหมด ตัวอย่างเช่นเสียงเดินทางผ่านเหล็กเร็วขึ้น (~ 0.233 ใน / μs) กว่าที่เดินทางผ่านพลาสติก (~ 0.086 ใน / μs)
สอบถามข้อมูลเพิ่มเติม:
● เลือกซื้อเครื่องวัดความหนาด้วยอัลตร้าโซนิคแบบต่างๆ คลิ๊ก
● สามารถเยี่ยมชม บทความจาก LEGA CORPARATION ได้ที่นี้
● โทร. 02-746-9933
● LINE: @lega
Related articles
 5 วิธีดูแลรักษารถยนต์ (0)
5 วิธีดูแลรักษารถยนต์ (0)
หน้าฝนแบบนี้อย่าปล่อยให้รถขาดการดูแล 1 . ทุกเช้าควรเดิน ตรวจรอบคันรถยนต์ก่อนขึ้นเสมอ สิ่งแรกที่เห็นเลย คือ ลมยางรถยนต์ สามารถมองด้วยสายตาได้เลย ลมยางที่ไม่เท่ากันจะส่งผลต่อการทรงตัวของรถ ตรวจดูที่ปัดน้ำฝนว่ายางปัดสภาพพร้อมการใช้งานไหม 2 . ก้มดูใต้ท้องรถ รอยหยด รอยรั่ว ต่างๆ […] Posted in เครื่องทดสอบน้ำมัน, กล้องส่องในท่อ, เครื่องวัดความเงา, เครื่องวัดความสั่นสะเทือน, เครื่องวัดอุณหภูมิ, News and Event, กล้องถ่ายภาพความร้อน การวัดความชื้นในดิน (0)
การวัดความชื้นในดิน (0)
การวัดความชื้นในดิน การวัดความชื้นในดิน นั้นถือเป็นสิ่งที่สำคัญและจำเป็นในการปลูกพืช จำเป็นต้องใช้ เครื่องวัดดิน และ เครื่องวัดกรดด่าง เพราะว่าจะได้รู้ถึงความชื้นที่เหมาะสมเพราะพืชแต่ละชนิดนั้นต้องการน้ำมากน้อยเพียงใด ที่ไม่เท่ากัน […] Posted in เครื่องวัดพีเอช, News and Event, เครื่องวัดความชื้นภายในดิน ความชื้นสัมพัทธ์ในอากาศ | Humidity Measurement (0)
ความชื้นสัมพัทธ์ในอากาศ | Humidity Measurement (0)
เลือกอ่านเฉพาะหัวข้อ..คลิ๊ก! ◼ ความชื้นสัมพัทธ์ในอากาศ ◼ การวัดค่าความชื้นสัมพัทธ์ในอากาศ ◼ วิธีการตรวจวัด ไฮโกรมิเตอร์แบบกระเปาะเปียก-กระเปาะแห้ง ◼ สอบถามข้อมูลเพิ่มเติม ความชื้นสัมพัทธ์ในอากาศ ความชื้น (Humidity) คือ ปริมาณไอน้ำที่มีอยู่ในอากาศ […] Posted in เครื่องวัดความชื้นอากาศ, News and Event เครื่องวัดอุณหภูมิและความชื้น (0)
เครื่องวัดอุณหภูมิและความชื้น (0)
เลือกอ่านเฉพาะหัวข้อ..คลิ๊ก! ◼ เครื่องวัดอุณหภูมิและความชื้นของทางบริษัทเรามีทั้งหมด 4แบบ ดังนี้ ◼ เราพอจะรู้เรื่องเครื่องมือวัดอุณหภูมิและความชื้นในแบบต่างๆบ้างแล้ว เราจะบอกผลเสียจากความชื้น ว่ามีอะไรบ้าง? ◼ วิธีการแก้ไขปัญหาความชื้น เครื่องวัดอุณหภูมิและความชื้น […] Posted in เครื่องวัดความชื้นอากาศ, เครื่องวัดอุณหภูมิ, News and Event อุณหภูมิน้ำมันที่เหมาะกับการทอดอาหาร (Frying food) (0)
อุณหภูมิน้ำมันที่เหมาะกับการทอดอาหาร (Frying food) (0)
เลือกอ่านเฉพาะหัวข้อ..คลิ๊ก! ◼ การทอดอาหาร ◼ 2 รูปแบบที่ใช้ในการทอด ◼ ประเภทของน้ำมันที่ใช้ทอดมี 2 ประเภท ◼ วัตถุดิบที่นิยมในการทอด ◼ คำแนะนำเลือกใช้น้ำมันในการทอดอาหาร อาหารทอดนั้นมีอัตราการบริโภคที่สูงขึ้นอย่างรวดเร็วและเป็นที่นิยมอย่างมาก […] Posted in เครื่องทดสอบน้ำมัน, เครื่องวัดอุณหภูมิ, News and Event การใช้งานเครื่องวัดออกซิเจนในน้ำ (Dissdolved Oxygen Meter) (0)
การใช้งานเครื่องวัดออกซิเจนในน้ำ (Dissdolved Oxygen Meter) (0)
เลือกอ่านเฉพาะหัวข้อ..คลิ๊ก! ◼ ออกซิเจนในน้ำ | Dissdolved Oxygen ◼ ประเภทของเครื่องวัดออกซิเจนในน้ำ | Dissdolved Oxygen Meter ◼ ข้อมูลเพิ่มเติม ออกซิเจนมีความสำคัญในการดำรุงชีวิตของ มนุษย์ สัตว์ และพืช หากปราศจากออกซิเจนสิ่งมีชีวิตจะตายในไม่กี่นาที ออกซิเจนพบได้ในอากาศ […] Posted in เครื่องวัดออกซิเจนในน้ำ, News and Event
Top7 : Popular articles
-
 ไฟฟ้ากระแสตรง(DC) แล...
การทำความรู้จักหรือทำความเข้าใจเกี่ยวกับเรื่องของ ไฟฟ้ากระแสตรง(DC) และไฟฟ้ากระแสสลับ(AC) นั้นเป็นเรื่องพื้นฐานเลยท...
ไฟฟ้ากระแสตรง(DC) แล...
การทำความรู้จักหรือทำความเข้าใจเกี่ยวกับเรื่องของ ไฟฟ้ากระแสตรง(DC) และไฟฟ้ากระแสสลับ(AC) นั้นเป็นเรื่องพื้นฐานเลยท...
-
 การใช้งานและอ่านค่าม...
เลือกอ่านเฉพาะหัวข้อ..คลิ๊ก!
◼ การใช้งานอนาล็อกมัลติมิเตอร์(Analog Multimeter) เบื้องต้น
◼ มัลติมิเ...
การใช้งานและอ่านค่าม...
เลือกอ่านเฉพาะหัวข้อ..คลิ๊ก!
◼ การใช้งานอนาล็อกมัลติมิเตอร์(Analog Multimeter) เบื้องต้น
◼ มัลติมิเ...
-
 การหาค่าแรงม้า (HP)...
กำลังม้า แรงม้า หรือ horsepower (hp) นั้น ริเริ่มขึ้นครั้งแรกในยุคปฏิวัติอุตสาหกรรมในประเทศอังกฤษ ซึ่งใช้ม้าเป็นต้น...
การหาค่าแรงม้า (HP)...
กำลังม้า แรงม้า หรือ horsepower (hp) นั้น ริเริ่มขึ้นครั้งแรกในยุคปฏิวัติอุตสาหกรรมในประเทศอังกฤษ ซึ่งใช้ม้าเป็นต้น...
-
 Dew Point วัดอุณหภูม...
Dew Point หรือ อุณหภูมิจุดน้ำค้าง คือค่าที่ได้จากคำนวณโดยนำค่าการวัดอุณหภูมิในอากาศ และค่าความชื้นสัมพัทธ์ แทนค่าใน...
Dew Point วัดอุณหภูม...
Dew Point หรือ อุณหภูมิจุดน้ำค้าง คือค่าที่ได้จากคำนวณโดยนำค่าการวัดอุณหภูมิในอากาศ และค่าความชื้นสัมพัทธ์ แทนค่าใน...
-
 ตารางแปลงหน่วยความดั...
ตารางแปลงหน่วยความดัน/ตารางแปลงหน่วยแรงดัน Pressure Conversion Table
รายละเอียดตามตารางด้านล่าง
คลิกที่นี่เพื่อชม...
ตารางแปลงหน่วยความดั...
ตารางแปลงหน่วยความดัน/ตารางแปลงหน่วยแรงดัน Pressure Conversion Table
รายละเอียดตามตารางด้านล่าง
คลิกที่นี่เพื่อชม...
-
 ทำไมค่าไฟฟ้าแพง
อัตราค่าไฟฟ้าสำหรับที่อยู่อาศัย คิดยังไง?
บิลค่าไฟฟ้าสำหรับที่อยู่อาศัยทั่วไป การไฟฟ้าจะแบ่งใช้งานเป็นประเภทที่ 1...
ทำไมค่าไฟฟ้าแพง
อัตราค่าไฟฟ้าสำหรับที่อยู่อาศัย คิดยังไง?
บิลค่าไฟฟ้าสำหรับที่อยู่อาศัยทั่วไป การไฟฟ้าจะแบ่งใช้งานเป็นประเภทที่ 1...
-
 การอ่านค่าจากเวอร์เน...
เลือกอ่านเฉพาะหัวข้อ..คลิ๊ก!
◼ เวอร์เนียร์คาลิปเปอร์
◼ เวอร์เนียร์คาลิปเปอร์ เเบบอนาล็อค
◼ เวอร์เนียร์คาลิปเปอร์...
การอ่านค่าจากเวอร์เน...
เลือกอ่านเฉพาะหัวข้อ..คลิ๊ก!
◼ เวอร์เนียร์คาลิปเปอร์
◼ เวอร์เนียร์คาลิปเปอร์ เเบบอนาล็อค
◼ เวอร์เนียร์คาลิปเปอร์...


